
Rýchle programovanie a jednoduché preprogramovanie
Jednoduchšie splnenie bezpečnostných štandardov
Možnosť ľahkého presunu robota medzi pracoviskami
Možnosť ovládania bežným personálom bez potreby programátora
Vysoká bezpečnosť z pohľadu robota aj nástroja
Porovnateľná rýchlosť so štandardnými priemyselnými robotmi (závisí od zváracej technológie)
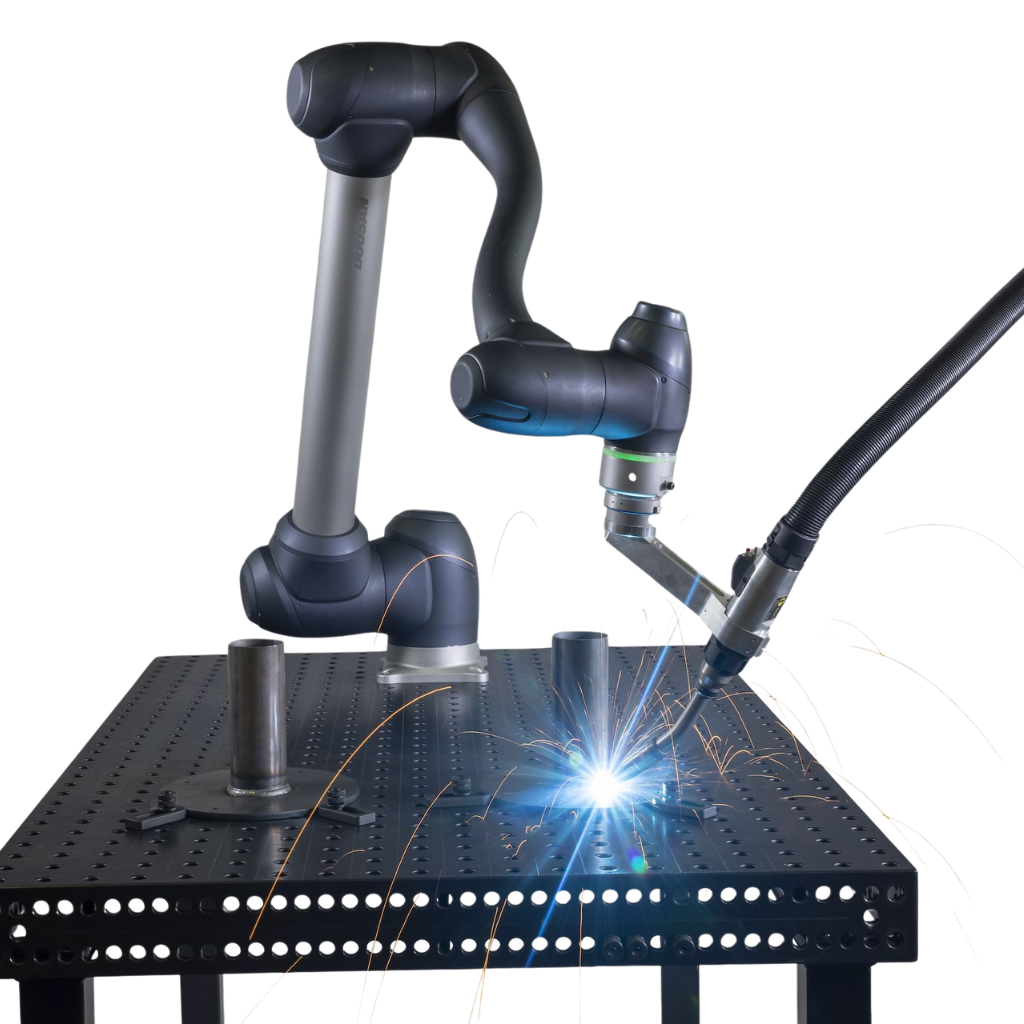
![]() Ideálna výška robota nad pracovným stolom zodpovedá vzdialenosti TCP horáka od príruby.
Ideálna výška robota nad pracovným stolom zodpovedá vzdialenosti TCP horáka od príruby.
![]() + Väčší dosah v obvodovej oblasti.
+ Väčší dosah v obvodovej oblasti.
![]() – „Mŕtva“ zóna v oblasti základne robota alebo stojana.
– „Mŕtva“ zóna v oblasti základne robota alebo stojana.
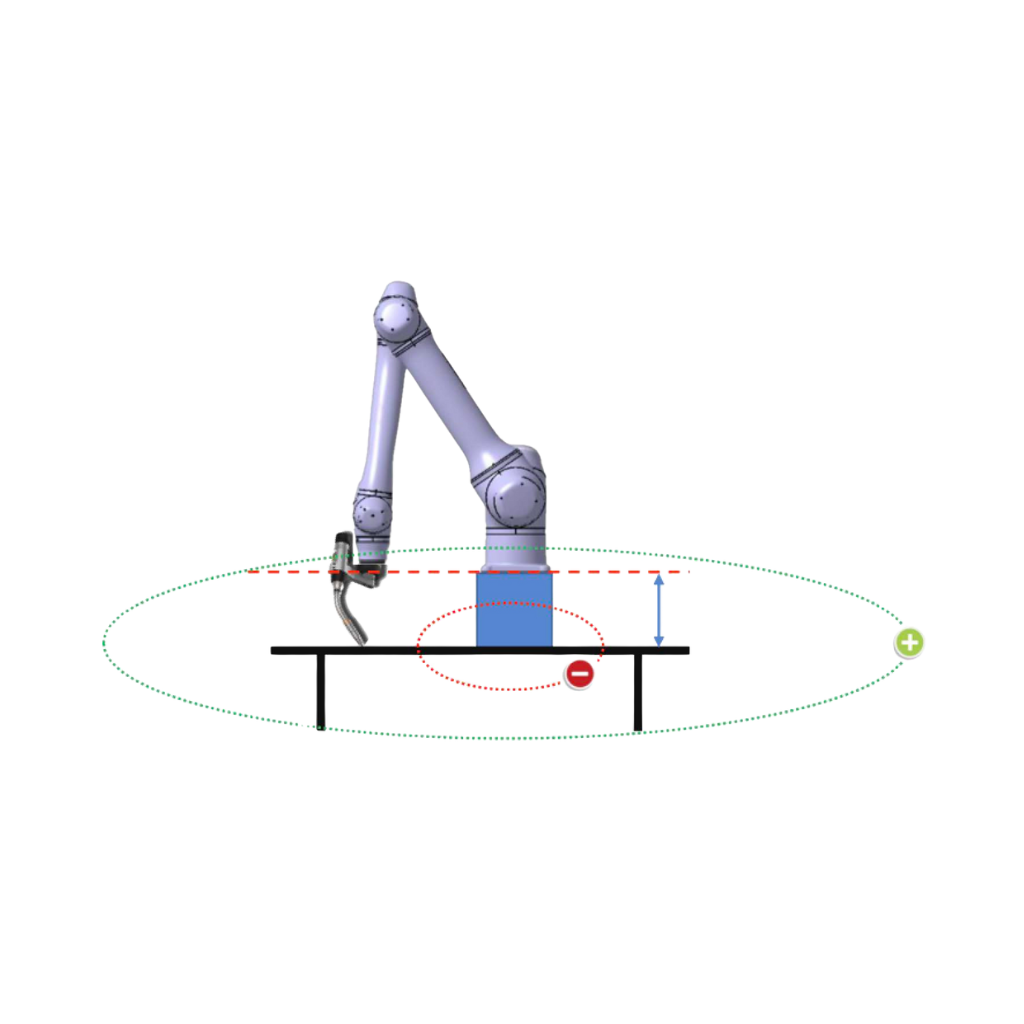
![]() Je potrebné zvážiť výšku inštalácie vzhľadom na priechodnosť ramena a obmedzenia uhla pri zváraní.
Je potrebné zvážiť výšku inštalácie vzhľadom na priechodnosť ramena a obmedzenia uhla pri zváraní.
![]() + Základňa robota neprekáža pri práci.
+ Základňa robota neprekáža pri práci.
![]() – Menší dosah v obvodovej oblasti.
– Menší dosah v obvodovej oblasti.

![]() Zvolenej hmotnosti koncového zariadenia
Zvolenej hmotnosti koncového zariadenia
![]() Vyváženia a ťažiska koncového zariadenia
Vyváženia a ťažiska koncového zariadenia
![]() Horáka s držiakom – konštantné ťažisko a hmotnosť
Horáka s držiakom – konštantné ťažisko a hmotnosť![]() Konštantného odporu (vyváženie a ťažisko v závislosti na pohybe robota)
Konštantného odporu (vyváženie a ťažisko v závislosti na pohybe robota)
![]() Káblového zväzku – konštantná hmotnosť, ale premenlivé ťažisko podľa polohy zväzku)
Káblového zväzku – konštantná hmotnosť, ale premenlivé ťažisko podľa polohy zväzku)
![]() Použiť balancer s správne zvolenou silou ťahu
Použiť balancer s správne zvolenou silou ťahu
![]() Správne umiestniť podporné vedenia, aby sa minimalizovalo obmedzenie dosahu
Správne umiestniť podporné vedenia, aby sa minimalizovalo obmedzenie dosahu


![]() Zvárací oblúk – extrémne teplo a svetelný tok
Zvárací oblúk – extrémne teplo a svetelný tok
![]() Malý prierez drôtu (katódy) – nebezpečenstvo mechanického poranenia
Malý prierez drôtu (katódy) – nebezpečenstvo mechanického poranenia
